ГОСТ 27254-87 Машины землеройные. Система рулевого управления колесных машин

ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
МАШИНЫ ЗЕМЛЕРОЙНЫЕ
СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСНЫХ МАШИН
ГОСТ 27254-87
(ИСО 5010-84)
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО СТАНДАРТАМ
Москва
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
|
Машины землеройные СИСТЕМА
РУЛЕВОГО УПРАВЛЕНИЯ Earth-moving machinery. |
ГОСТ (ИСО 5010-84) |
Срок действия с 01.01.88
до 01.01.93
1. НАЗНАЧЕНИЕ
Настоящий стандарт устанавливает методы испытаний систем рулевого управления колесных землеройных машин и критерии качества их работы, позволяющие проводить единообразную оценку управляемости землеройных машин (далее - машин), работающих на строительных площадках или предназначенных для движения по дорогам.
2. ОБЛАСТЬ ПРИМЕНЕНИЯ
Настоящий стандарт распространяется на самоходные колесные землеройные машины, способные развивать скорость св. 20 км/ч.
2.1. Основные типы землеройных машин (ИСО 6165):
трактор;
погрузчик;
землевоз;
самоходный скрепер;
экскаватор;
автогрейдер.
2.2. Для поворота машин применяют системы рулевого управления с ручным управлением, с усилителем, с силовым приводом.
3. ССЫЛКИ
Ссылочные документы приведены в обязательном приложении.
4. ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
4.1. Система рулевого управления - система, включающая все элементы машины, участвующие в управлении поворотом машины.
4.2. Рулевое управление с поворотными кулаками и трапецией - система, использующая обычную автомобильную кинематическую схему с двумя управляемыми колесами, установленными на одном мосту и соединенными с машиной посредством вертикальных поворотных шкворней, находящихся в непосредственной близости от каждого из колес; углы, под которыми установлены колеса относительно вертикальных шкворней, выбраны так, что при любом угле поворота продолжения горизонтальных осей колес пересекаются в одной точке.
4.3. Рулевое управление с шарнирно-сочлененной рамой - система, содержащая вертикальную ось поворота, соединяющую две секции машины, например переднюю и заднюю секции шасси или рамы. Управление поворотом осуществляется посредством складывания секций машины вокруг оси поворота.
4.4. Рулевое управление с поворотом одноосного тягача - разновидность рулевого управления с шарнирно-сочлененной рамой, при которой вертикальная ось поворота расположена в районе колесной оси тягача.
4.5. Рулевое управление с бортовым поворотом - система, использующая изменение скорости и (или) направления вращения колес правого и левого бортов машины в качестве средства для изменения или поддержания направления ее движения.
4.6. Ручное рулевое управление - система, использующая для поворота машины в нормальных условиях исключительно мускульную энергию оператора.
4.7. Рулевое управление с усилителем - система, использующая для поворота машины мускульную энергию оператора и вспомогательный энергетический источник (источники). При отсутствии вспомогательного источника (источников) поворот машины может быть осуществлен только за счет мускульной энергии оператора (п. 7.2.1).
4.8. Рулевое управление с силовым приводом - система, в которой поворот машины осуществляется за счет энергетического источника (источников); при его отсутствии поворот машины не может быть осуществлен за счет мускульной энергии оператора (п. 7.2.1).
4.9. Аварийная система рулевого управления - резервная система, используемая для поворота машины в случае отказа рабочего энергетического источника (источников) системы рулевого управления или в случае остановки двигателя.
4.10. Энергетический источник системы рулевого управления
4.10.1. Рабочий энергетический источник системы рулевого управления - средство обеспечения энергией для выполнения поворота в системах с усилителем и системах с силовым приводом, например гидравлический насос, воздушный компрессор, аккумулятор, электрогенератор.
4.10.2. Аварийный энергетический источник системы рулевого управления - средство обеспечения энергией аварийной системы рулевого управления, например гидравлический насос воздушный компрессор, аккумулятор, батарея электропитания.
4.11. Отказ рабочего энергетического источника системы рулевого управления - полная и мгновенная потеря мощности рабочим энергетическим источником системы рулевого управления. Принимается, что в течение одного и того же времени не происходит более одного отказа.
4.12. Командный орган рулевого управления - средство ручного управления, с помощью которого оператор передает свою мускульную энергию системе рулевого управления, чтобы вызвать желаемый поворот машины. Это обычное рулевое колесо и другие эквивалентные средства ручного управления.
4.13. Усилие управления - необходимое усилие, прикладываемое оператором к командному органу рулевого управления для осуществления поворота машины.
4.14. Угол поворота - общий угол отклонения, измеряемый между передними и задними колесами при их перемещении относительно одной или более вертикальных осей из положения обычного прямолинейного движения в положение поворота.
4.14.1. Угол поворота для многоосных машин определяют между колесами первого переднего и последнего заднего мостов.
4.14.2. Для ручного управления с поворотными кулаками и трапецией характерно, что угол поворота колес, расположенных с внутренней стороны поворота, превышает угол поворота колес, расположенных с внешней стороны поворота. Следовательно, для этой системы должно быть также указано место измерения угла поворота.
4.14.3. Угол поворота, полученный в случае комбинированного применения кинематических схем, включая систему управления с поворотными кулаками и трапецией, определяют по п. 4.14, при этом должно быть указано место измерения в соответствии с требованиями п. 4.14.2.
4.15. Окружность поворота по следу колес - габаритный диаметр поворота по следу внешней шины, определяемый по п. 10.1.
5. ОБЩИЕ ТРЕБОВАНИЯ
Требования, указанные в пп. 5.1- 5.9, относятся ко всем системам рулевого управления, на которые распространяется настоящий стандарт.
5.1. Командный орган рабочей системы рулевого управления должен быть для оператора органом рулевого управления при любых обстоятельствах.
5.2. Системы рулевого управления должны быть сконструированы и установлены на машину таким образом, чтобы они выдерживали без функциональных повреждений предусмотренные п. 11.1.1 усилия, прикладываемые оператором в состоянии стресса.
5.3. Чувствительность, регулирование и быстродействие рабочей системы рулевого управления должны соответствовать требованиям п. 11.2 и позволять квалифицированному оператору уверенно вести машину по заданной траектории при выполнении всех операций, для которой предназначена данная машина.
5.3.1. Машины с задними управляемыми колесами должны иметь устойчивое рулевое управление (п. 11.2.2 ).
5.3.2. Машины с максимальной расчетной скоростью заднего хода св. 20 км/ч должны иметь аналогичные показатели в части усилий скорости поворота и продолжительности работы системы рулевого управления при движении передним и задним ходом. Это движение следует подтверждать анализом кинематической схемы или расчетами. Испытания при движении задним ходом не проводят;
5.4. Гидравлические контуры систем рулевого управления (при их наличии) должны иметь следующие устройства.
5.4.1. Устройства для регулировки давления, необходимые для предотвращения возникновения чрезмерных давлений в гидросистеме.
5.4.2. Гибкие рукава, соединительную арматуру и жесткие трубопроводы с разрывным давлением, не менее чем в 4 раза превышающим наибольшее предельное давление, установленное устройствами для регулировки давления энергетического источника (источников) рабочей и аварийной систем рулевого управления.
5.4.3. Разводку трубопроводов, исключающую чрезмерный изгиб, скручивание, трение и износ рукавов.
5.5. Надежность системы рулевого управления должна быть обеспечена правильным выбором и конструкцией ее элементов, а также компоновкой, удобной для проверки и технического обслуживания.
5.6. Помехи в системе рулевого управления должны соответствовать следующим требованиям.
5.6.1. Компоновка и кинематическая схема должны сводить к минимуму помехи, вызываемые работой других систем машины (прогиб или смещение элементов подвески, боковые наклоны машины, качение осей и отклонения от курса, связанные с возникновением крутящих моментов от действия привода и тормозов).
5.6.2. Помехи от воздействия внешних сил при эксплуатации машины в условиях, для которых она предназначена, не должны существенно влиять на ее управляемость.
5.7. Системы рулевого управления с усилителем и стендовым приводом должны соответствовать следующим требованиям.
5.7.1. Системы должны быть независимы от других силовых устройств и контуров. Если это невозможно, то системы рулевого управления с усилителем и силовым приводом должны иметь преимущественное действие по сравнению с другими системами или контурами, исключая аварийную систему рулевого управления и аварийную тормозную систему, эффективность которой должна соответствовать требованиям ИСО 3450.
5.7.2. Если от рабочего энергетического источника системы рулевого управления снабжаются другие системы (потребители), то любой отказ этих систем (потребителей) необходимо рассматривать как отказ рабочего энергетического источника системы рулевого управления.
5.7.3. При отказе рабочего энергетического источника системы рулевого управления допускается изменять передаточное отношение от органа рулевого управления к управляемым колесам при выполнении требований пп. 11.3, 11.4 или 11.5.
5.8. Машины, оборудованные рулевым управлением с силовым приводом, должны быть снабжены аварийной системой рулевого управления.
Эту систему рекомендуется выполнять независимой от других силовых устройств и контуров. Если это невозможно, то устройства и контуры аварийной системы рулевого управления должны иметь преимущество по сравнению с другими системами или контурами, исключая аварийную тормозную систему, эффективность которой должна соответствовать требованиям ИСО 3450.
5.9. Руководство для оператора: машин с аварийной системой рулевого управления должно содержать следующие сведения:
а) информацию о том, что машина оборудована аварийной системой рулевого управления;
б) пределы возможностей аварийной системы рулевого управления;
в) методы полевых испытаний по проверке работоспособности аварийной системы рулевого управления.
6. ЭРГОНОМИЧЕСКИЕ ТРЕБОВАНИЯ
6.1. Машина должна поворачиваться в направлении, соответствующем направлению перемещения командного органа рулевого управления, т.е. вращение рулевого колеса по часовой стрелке должно вызывать поворот машины вправо, вращение против часовой стрелки - влево.
6.2. Усилие управления по п. 4.13 должно быть не более следующих значений.
6.2.1. Усилие управления для рабочей системы рулевого управления при испытаниях по разд. 11 не должно превышать 115 Н.
6.2.2. Усилие управления для аварийной системы рулевого управления при испытаниях по разд. 11 не должно превышать 350 Н.
6.3. Неравномерность хода командного органа для получения заданного угла поворота колес вправо и влево до угла 30° не должна превышать 25%. Допускается проверять этот показатель расчетным путем. Для систем рулевого управления с поворотными кулаками и трапецией угол 30° относится к колесам, расположенным с внутренней стороны поворота.
6.4. Если для продолжения изменения угла поворота необходимо продолжение перемещения командного органа, желательно, чтобы ход командного органа был больше в положении прямолинейного движения, что достигается применением червячного рулевого механизма с переменным передаточным числом.
7. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
7.1. Рабочие системы рулевого управления. Для всех рабочих систем рулевого управления (с ручным управлением, с усилителем или с силовым приводом) усилие управления по п. 4.13 не должно превышать 115 Н при прохождении испытательных коридоров по пп. 11.2.3 и 11.4.3.
7.2. Аварийное рулевое управление для систем с усилителем
7.2.1. Усилие управления при испытаниях аварийной системы рулевого управления по пп. 11.3.5 , 11.3.6 и 11.4.4 не должно превышать 350 Н. Если это требование не выполняется, то данную систему рулевого управления необходимо рассматривать и испытывать как систему с силовым приводом.
7.2.2. Машина должна быть оснащена устройством предупредительной сигнализации, оповещающим об отказе рабочего энергетического источника, системы рулевого управления. Это устройство должно обеспечивать звуковую или визуальную сигнализацию и должно срабатывать при отказе рабочего энергетического источника. Аварийный энергетический источник или устройство предупредительной сигнализации не устанавливают, если аварийная управляемость машины соответствует требованиям п. 7.2.1 и не зависит от времени или числа включений рулевого управления; при этом значительное увеличение усилия управления или значительное увеличение перемещения рулевого колеса для поворота на данный угол дает оператору сигнал об отказе рабочего энергетического источника системы рулевого управления.
7.2.3. Данная аварийная система рулевого управления должна действовать также и при движении машины задним ходом, если максимальная расчетная скорость заднего хода превышает 20 км/ч.
7.3. Аварийное рулевое управление для систем с силовым приводом
7.3.1. Система рулевого управления с силовым приводом должна быть снабжена аварийным энергетическим источником по 4.10.2.
7.3.2. Усилие управления при испытаниях по пп. 11.3.5, 11.3.6 и 11.4.4 не должно превышать 350 Н.
7.3.3. Машина должна быть оснащена устройством предупредительной сигнализации, оповещающим об отказе рабочего энергетического источника системы рулевого управления. Это устройство должно обеспечивать звуковую или визуальную сигнализацию и должно срабатывать при отказе рабочего энергетического источника.
7.3.4. Данная аварийная система рулевого управления должна действовать также и при движении машины задним ходом, если максимальная расчетная скорость заднего хода превышает 20 км/ч.
7.4. Все системы рулевого управления (рабочие и аварийные) не должны получать функциональных повреждений при испытаниях по п. 11.1.1.
8. ИСПЫТАТЕЛЬНЫЕ КОРИДОРЫ
Испытания систем рулевого управления следует выполнять в коридорах, имеющих равную поверхность с уплотненным или твердым покрытием и уклоном не более 3% в любом направлении (пп. 10.1, 11.2.1, 11.3.3. 11.4.1 и черт. 1- 4).
8.2. Размеры испытательного коридора определяют в зависимости от диаметра окружности поворота по следу колес, колесной базы и ширины машины по шинам (черт. 1).
8.3. Размеры испытательного коридора определяют в зависимости от типа машины, диаметра окружности поворота по следу колее, колесной базы и ширины по шинам (черт. 4).
8.4. Указанные на черт. 1 и 4 размеры коридора являются минимальными.
8.5. Колесной базой многоосной машины при установлении испытательного коридора по черт. 1 или 4 является расстояние между осями первого и последнего заднего мостов.
8.6. Допускается использовать испытательные коридоры, зеркально-симметричные по отношению к изображенным на черт. 1 и 4.
8.7. В испытательном коридоре, показанном на черт. 4 (или зеркально-симметричном ему), допускается участку № 4 давать противоположное направление, чтобы поворот с участка № 3 на участок № 4 можно было выполнять в любом из двух направлений. Этот вариант помогает разместить испытательный коридор, вписав его в размеры имеющейся испытательной площадки.
8.8. На машинах, которые могут быть оборудованы различными комплектами шин, при испытаниях (за исключением альтернативных испытаний по черт. 3) должны быть установлены шины из числа рекомендованных изготовителем, имеющие наименьшую ширину протектора.
9. ТРЕБОВАНИЯ К ИСПЫТУЕМОЙ МАШИНЕ
9.1. Самоходные скреперы и землевозы, не предназначенные для движения по дорогам, должны проходить испытания при максимальном, указанном изготовителем, значении полной массы машины с грузом и расчетном распределении ее по осям, включая массу наиболее тяжелых видов оборудования, рекомендуемых изготовителем для одновременного монтажа, массу оператора (75 кг) и топлива при полной заправке бака.
9.2. Самоходные скреперы и землевозы, предназначенные для движения по дорогам, должны проходить испытания при максимальном, указанном изготовителем, значении массы машины с грузом и расчетном распределении ее по осям, как указано в п. 9.1. Если при этом не превышены установленные законом ограничения для дорог, то в последнем случае испытания проводят при максимальных разрешенных значениях массы и осевых нагрузок для дорог общего пользования.
9.3. Колесные, погрузчики, колесные тракторы, экскаваторы и автогрейдеры, предназначенные и не предназначенные для движения по дорогам, должны проходить испытания при максимальном, указанном изготовителем, значении массы машины без груза, включая массу наиболее тяжелых видов оборудования и рабочих органов, рекомендуемых изготовителем для одновременного монтажа и создающих наибольшую нагрузку на управляемый мост (мосты), массу оператора (75 кг) и топлива при полной заправке бака.
9.4. Параметры узлов и систем машины, влияющие на ее управляемость, должны соответствовать указаниям изготовителя. Сюда относятся размеры шин и давление воздуха в шинах, давление и расход рабочей жидкости в системе рулевого управления, момент включения устройства предупредительной сигнализации и т.д.
10. МЕТОД ОПРЕДЕЛЕНИЯ ОКРУЖНОСТИ ПОВОРОТА ПО СЛЕДУ КОЛЕС
10.1. Окружность поворота по следу колес (используемая при расчете размеров испытательных коридоров по черт. 1 , 2 и 4 ) представляет собой габаритный радиус поворота по внешней шине, определяемый по ГОСТ 27257-87 (ИСО 7457) и в соответствии со следующими указаниями.
10.1.1. Используют только рабочий командный орган (например, рулевое колесо) и рабочую систему рулевого управления. Органы управления других механизмов, которые могут повлиять па траекторию поворота (например, бортовые тормоза, наклон колес автогрейдера, задние управляемые тележки автогрейдеров), использовать не допускается.
10.1.2. Для машин с разными окружностями поворота вправо и влево при расчете испытательного коридора используют меньшую из двух окружностей поворота по следу колес.
10.1.3. Для машин с тремя и более мостами, имеющих буксируемые прицепы, окружность поворота по следу колес определяют без буксировки прицепа или полуприцепа, во избежание упора в системе рулевого управления при соприкосновении прицепа с тягачом.
11. ИСПЫТАНИЯ РУЛЕВОГО УПРАВЛЕНИЯ
11.1. Испытания, проводимые со всеми системами рулевого управления
11.1.1. Все системы рулевого управления должны выдерживать без функционального повреждения усилие 900 Н, приложенное к командному органу рулевого управления в направлении его перемещения (см. п. 5.2 ).
11.1.2. Следы колес испытуемой машины должны находиться внутри испытательных коридоров в соответствии с черт. 1 , 2 и 4 . Данное требование не распространяется на следы колес прицепов или полуприцепов машин с тремя или более осями, не предназначенных для движения по дорогам.
11.2. Испытания рабочей системы рулевого управления
11.2.1. Эффективность системы рулевого управления должна быть достаточной для того, чтобы при движении машины с максимальной скоростью переднего хода следы ее колес не выходили за границы прямого испытательного коридора длиной 100 м, ширина которого в 1,25 раза превышает ширину машины по шинам. Допускается корректировать курс с помощью рулевого управления.
11.2.2. Машины с задними управляемыми колесами должны быть испытаны при движении со скоростью (8±2) км/ч по круговой траектории диаметром, соответствующим примерно половине значения наибольшего угла поворота. При освобождении командного органа угол поворота не должен возрастать (см. п. 5.3.1 ).
11.2.3. Система рулевого управления должна обеспечивать соответствие требованиям п. 11.1.2 при прохождении испытательного коридора согласно черт. 1 машинами, предназначенными для движения по дорогам, и коридора по черт. 4 машинами, не предназначенными для движения по этим дорогам. Коридоры должны соответствовать требованиям п. 8 . Машины должны двигаться передним ходом с установившейся скоростью (16±2) км/ч от момента, когда оси передних колес войдут в коридор, до момента, когда оси передних колес достигнут конца коридора. При этом регистрируют усилие управления, которое не должно превышать 115 Н. Допускается проводить несколько пробных заездов, чтобы оператор мог отработать навык плавного, постепенного приложения мускульного усилия к командному органу рулевого управления. (Альтернативный метод испытаний рулевого управления машин, предназначенных для движения по дорогам, указан в п. 11.4 .)
11.3. Испытания аварийной системы рулевого управления для машин, предназначенных для движения по дорогам
11.3.1. Работу устройства предупредительной сигнализации аварийной системы рулевого управления проверяют по пп. 7.2.2 и 7.3.3.
11.3.2. Подача мощности к рабочей системе рулевого управления должна быть прекращена, если она передается от двигателя, поскольку мощность двигателя используется для движения машины по испытательным коридорам, указанным в пп. 11.3.3, 11.3.5, 11.3.6 и 11.3.8.
11.3.3. Эффективность аварийной системы рулевого управления должна быть достаточной для того, чтобы при движении машины со скоростью (16±2) км/ч следы ее колес (см. п. 11.1.2 ) не выходили за границы прямого испытательного коридора длиной 100 м, ширина которого в 1,25 раза превышает ширину машины по шинам. Допускается корректировать курс при помощи рулевого управления.
11.3.4. Перед началом любого заезда при испытаниях аварийной системы управления энергетический уровень аварийного источника не должен превышать нормальный уровень в момент срабатывания устройства предупредительной сигнализации, оповещающего об отказе рабочего энергетического источника.
11.3.5. Аварийное рулевое управление должно обеспечивать достаточное исполнительное усилие и продолжительность работы для выполнения требований п. 11.1.2 при безостановочном прохождении машиной испытательного коридора согласно черт. 1 со скоростью (8 ±2) км/ч с момента входа осей передних колес в коридор до момента достижения осями передних колес конца коридора.
11.3.6. Аварийное рулевое управление должно обеспечивать достаточное исполнительное усилие и скорость поворота для выполнения требований п. 11.1.2 при безостановочном прохождении машиной испытательного коридора согласно черт. 1 со скоростью (16±2) км/ч с момента входа осей передних колес в коридор до момента достижения осями передних колес конца коридора.
11.3.7. В процессе испытаний по пп. 11.3.5 и 11.3.6 регистрируют усилие управления, которое не должно превышать 350 Н. Допускается проводить несколько пробных заездов, чтобы оператор мог отработать навык плавного, постепенного приложения мускульного усилия к командному органу рулевого управления.
11.3.8. Испытания быстродействия аварийного рулевого управления по данному пункту проводят при выполнении машиной маневра согласия черт. 2 со скоростью (16±2) км/ч. Маневр выполняют в противоположную сторону по сравнению с изображенным на черт. 2 , если применялись испытательные коридоры, зеркально-симметричные по отношению к черт. 1 и 4 . Испытание начинают при нормальном энергетическом уровне аварийной системы рулевого управления. Поворот начинают в точке А. В начальный момент воздействия на командный орган должно срабатывать устройство для нанесения отметок на опорную поверхность, размещенное под передним мостом машины, и одновременно имитируется отказ рабочего энергетического источника (источников) системы рулевого управления. При выполнении машиной поворота на 90° следы колес не должны выходить за указанную на черт. 2 границу.
11.4. Альтернативные методы испытаний рулевого управления машин, предназначенных для движения по дорогам
Рулевое управление колесных машин, предназначенных для движения по дорогам, допускается подвергать испытаниям, описанным ниже, вместо испытаний, описанных в пп. 10, 11.2.3, 11.3.5- 11.3.8, где требуется испытывать машины в коридорах в соответствии с черт. 1 и 2.
11.4.1. Альтернативный испытательный маршрут
Альтернативный испытательный маршрут для машин, предназначенных для движения по дорогам, представляет собой габаритную окружность поворота машины диаметром 24 м, нанесенную на поверхность по п. 8.1 (черт. 3).
11.4.2. Угол поворота
Угол поворота для последующего использования при данных альтернативных испытаниях определяют, как указано ниже.
11.4.2.1. Используют только рабочий командный орган (например, рулевое колесо) и рабочую систему рулевого управления.
Органы управления других механизмов, которые могут повлиять на траекторию поворота (например, бортовые тормоза, наклон колес автогрейдера, задние управляемые колеса автогрейдера), использовать не допускается.
11.4.2.2. Машину выводят на испытательный маршрут и безостановочно двигают по круговой траектории со скоростью (3±1) км/ч. Для определения угла поворота, соответствующего маршруту по п. 11.4.1, по линии испытательной окружности должна двигаться наиболее удаленная от центра поворота точка машины (черт. 3).
11.4.3. Испытания рабочих систем рулевого управления
Система рулевого управления должна обеспечивать поворот машины из положения прямолинейного движения на угол по п. 11.4.2 в течение 4 с. Скорость переднего хода должна составлять (10±2) км/ч, усилие управления не должно превышать 115 Н. Испытания проводят с поворотом в левую и правую стороны.
11.4.4. Испытания аварийной системы рулевого управления
11.4.4.1. Аварийное рулевое управление должно обеспечивать достаточное исполнительное усилие и продолжительность работы для того, чтобы машина из положения прямолинейного движения безостановочно выполнила один поворот в левую и один - в правую сторону на угол по п. 11.4.2, после чего вернулась в положение прямолинейного движения. Скорость переднего хода должна составлять (10±2) км/ч, усилие управления не должно превышать 350 Н.
11.4.4.2. Аварийное рулевое управление должно обеспечивать достаточное исполнительное усилие и скорость поворота для того, чтобы повернуть машину из положения прямолинейного движения на угол по п. 11.4.2 в течение 6 с. Скорость переднего хода должна составлять (110±2) км/ч, усилие управления не должна превышать 350 Н. Испытания проводят с поворотом в левую и правую стороны.
11.4.4.3. Испытание быстродействия аварийного рулевого управления проводят при повороте движущейся машины из положения прямолинейного движения на угол по п. 11.4.2. В начальный момент воздействия на командный орган имитируется отказ рабочего энергетического источника системы рулевого управления. Промежуток времени от начала воздействия на командный орган до момента достижения угла поворота по п. 11.4.2 не должен превышать 6 с. Скорость переднего хода должна составлять (10±2) км/ч, усилие управления не должно превышать 350 Н. Испытания проводят с поворотом в ту сторону, для которой требуется наибольшее время по п. 11.4.4.2.
11.5. Испытания аварийной системы рулевого управления машин, не предназначенных для движения по дорогам
11.5.1. Машину с аварийной системой рулевого управления, соответствующей требованиям пп. 11.3 или 11.4.4 при массе машины по пп. 9.1 или 9.3, не подвергают испытаниям по п. 11.5.2.
11.5.2. Испытания аварийной системы рулевого управления машин, не предназначенных для движения по дорогам, проводят в соответствии с требованиями п. 11.3 , но вместо испытательного коридора по черт. 1 используют коридор по черт. 4 . Машины с диаметром окружности поворота по следу колес менее 12 м, а также колесные тракторы и автогрейдеры должны начинать движение по коридору (черт. 4 ) с линии «Старт 1» и заканчивать заезд по линии «Финиш 1». Все остальные машины должны начинать движение по коридору черт. 4 с линии «Старт 2» и заканчивать заезд на линии «Финиш 2».
Испытательный коридор для машин, предназначенных для движения по дорогам
Размеры, мм
Размеры коридора:
А - 14 м; В - в 1,75 раза больше диаметра окружности поворота по следу колес или 22 м (в зависимости от того, какой из размеров больше); С - в 2,00 раза больше максимальной колесной базы или 15 м (в зависимости от того, какой из размеров меньше); D - в 2,5 раза больше максимальной ширины по шинам; Е - в 1,25 раза больше максимальной ширины по шинам; 1 - финиш; 2 - участок № 3; 3 - участок № 2; 4 - участок № 1; 5 - старт
Черт. 1
Быстродействие аварийной системы рулевого управления
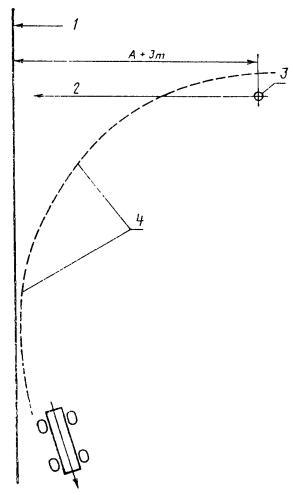
1 - перпендикуляр к первоначальному направлению движения; 2 - первоначальное направление движения; 3 - положение А передней оси в момент начала перемещения командного органа; 4 - внешняя линия следа колес
Черт. 2
Примечания:
1. Для машин, предназначенных для движения по дорогам, размер А определяют по черт. 1.
2. Для машин, не предназначенных для движения но дорогам, размер А определяют по черт. 4.
Альтернативный маршрут для испытаний рулевого управления машин, предназначенных для движения по дорогам
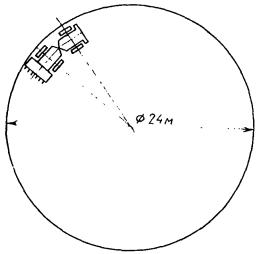
Черт. 3
Испытательный коридор для машин, не предназначенных для движения по дорогам
Размеры, мм
Размеры коридора:
А - в 1,10 раза больше диаметра окружности поворота по следу колес или 14 м (в зависимости от того, какой из размеров больше); В - в 1,75 раза больше диаметра окружности по следу колес или 22 м (в зависимости от того, какой из размеров больше); С - в 2,00 раза больше максимальной колесной базы или 15 м (в зависимости от того, какой из размеров меньше); D - в 2,5 раза больше максимальной ширины по шинам; Е - в 1,25 раза больше максимальной ширины по шинам. Длина коридора: машины с диаметром окружности поворота по следу колес не менее 12 м, колесные тракторы и автогрейдеры должны начинать испытание у линии «Старт 1» и заканчивать у линии «Финиш 1». Остальные машины должны начинать испытание у линии «Старт 2» и заканчивать у линии «Финиш 2». 1 - вариант положения участка № 4; 2 - участок № 4; 3 - финиш; 4 - линия «Финиш 1»; 5 - участок № 3; 6 - участок № 2; 7 - линия «Старт 1»; 8 - линия «Старт 2»; 9 - участок № 1.
Черт. 4
ПРИЛОЖЕНИЕ
Обязательное
ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
|
Раздел, подраздел, пункт в котором приведены ссылки |
Обозначение соответствующего стандарта |
Обозначение отечественного нормативно-технического документа, на который дана ссылка |
|
2.1 |
ИСО 6165 |
- |
|
5.7.1, 5.8 |
ИСО 3450 |
- |
|
10.1 |
ИСО 7457 |
ГОСТ 27257-87 |
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. ВНЕСЕН Министерством строительного, дорожного и коммунального машиностроения СССР
2. Постановлением Государственного комитета СССР по стандартам от 30.03.87 № 1032 введен в действие государственный стандарт СССР ГОСТ 27254-87, в качестве которого непосредственно применен международный стандарт ИСО 5010-84, с 01.01.88
СОДЕРЖАНИЕ
|
1. Назначение . 1 2. Область применения . 1 3. Ссылки . 1 4. Термины и определения . 1 5. Общие требования . 3 6. Эргономические требования . 4 7. Технические требования . 4 8. Испытательные коридоры .. 5 9. Требования к испытуемой машине . 5 10. Метод определения окружности поворота по следу колес . 5 11. Испытания рулевого управления . 6 Приложение Ссылочные нормативно-технические документы .. 10 |